Peoples
Research
Publication
Contact
MMC Lab
/
Research
Professor
Students
International Journal
International Conference
Domestic Journal
Domestic Conference
Patents
MMC Lab
/
Research
Peoples
Professor
Students
Research
Publication
International Journal
International Conference
Domestic Journal
Domestic Conference
Patents
Contact
📝
Research
Research Area
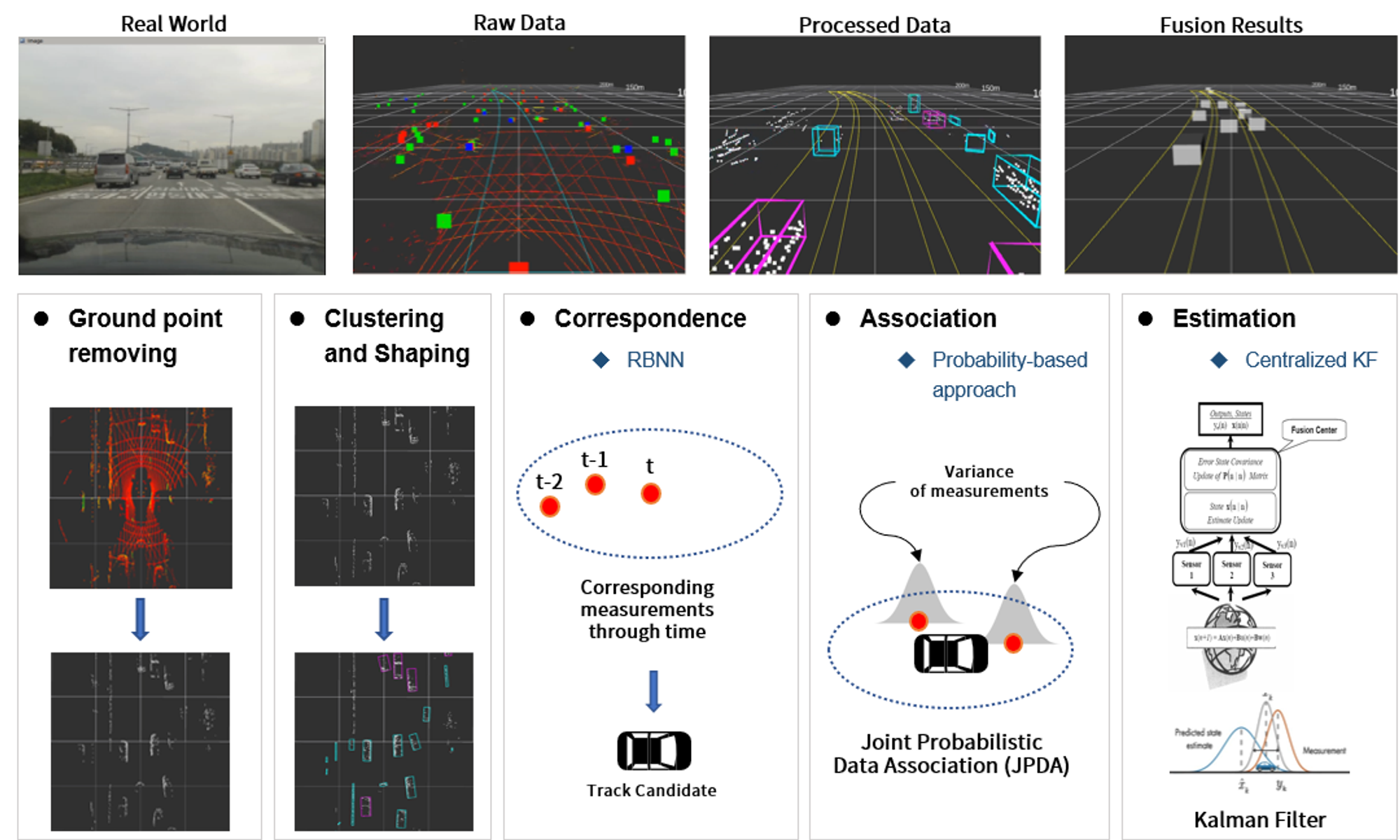
Multi-Sensor Fusion for Object Detection
•
Low-level Processing
•
High-level Fusion
Perception
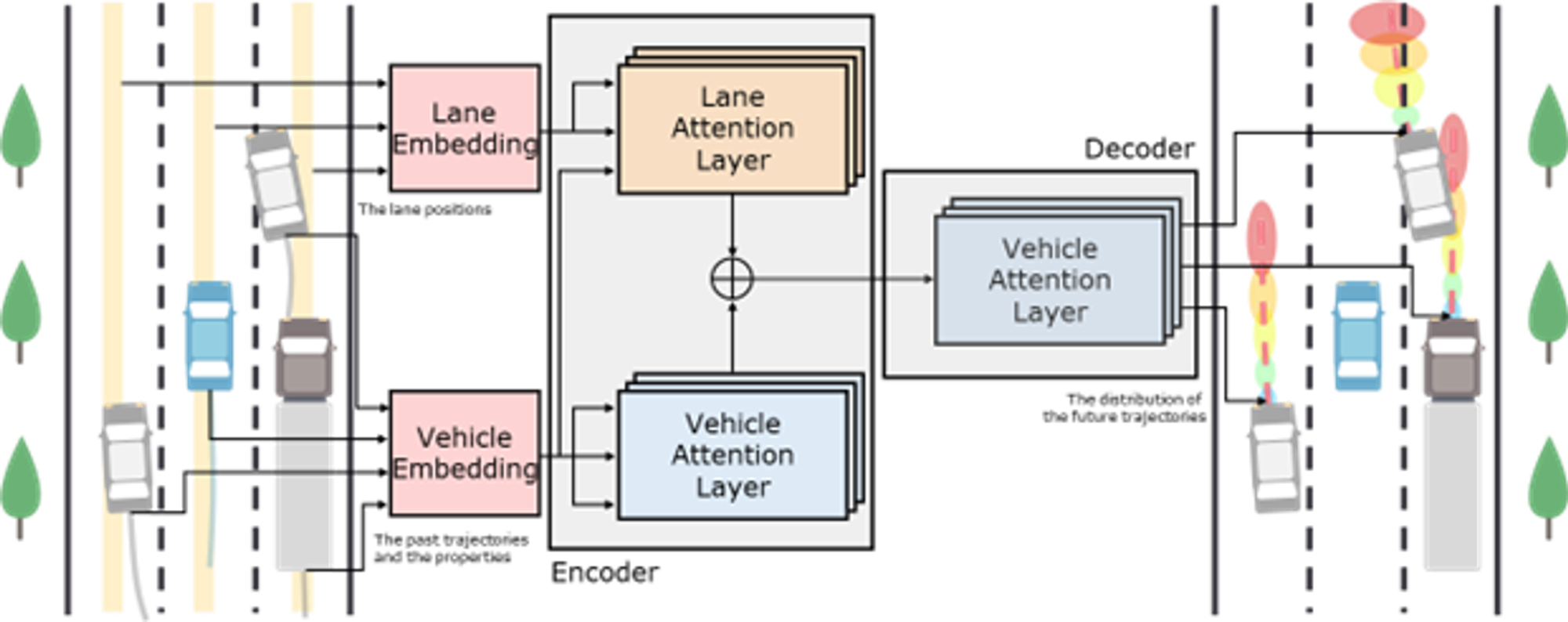
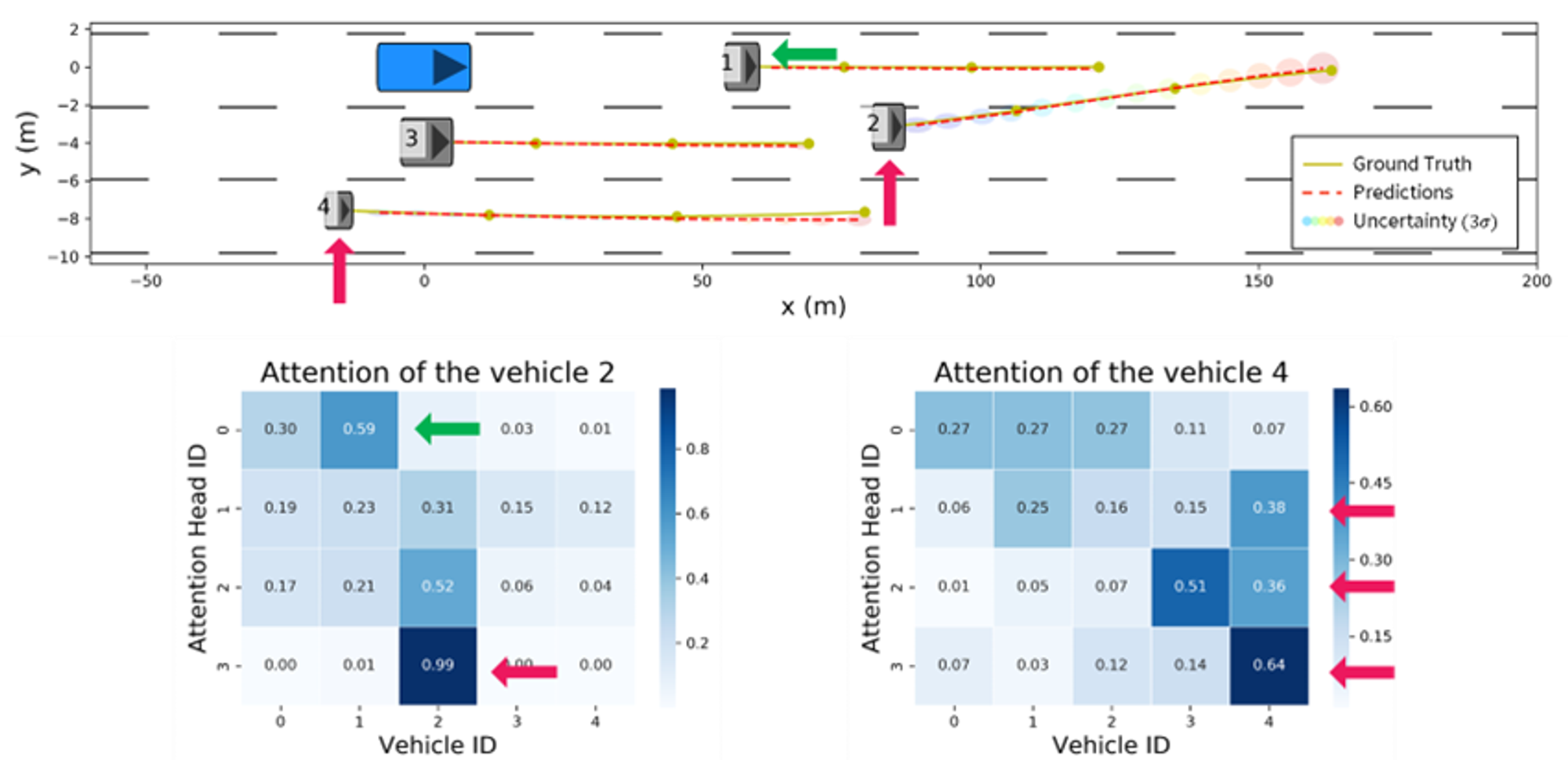
Interaction Aware Path Prediction via Multi-head attention
Prediction Result & Attention Heatmap
딥앙상블과 RNN을 이용한 경로 예측
•
RNN Architecture & Deep Ensemble Learning
•
Results
Path Prediction
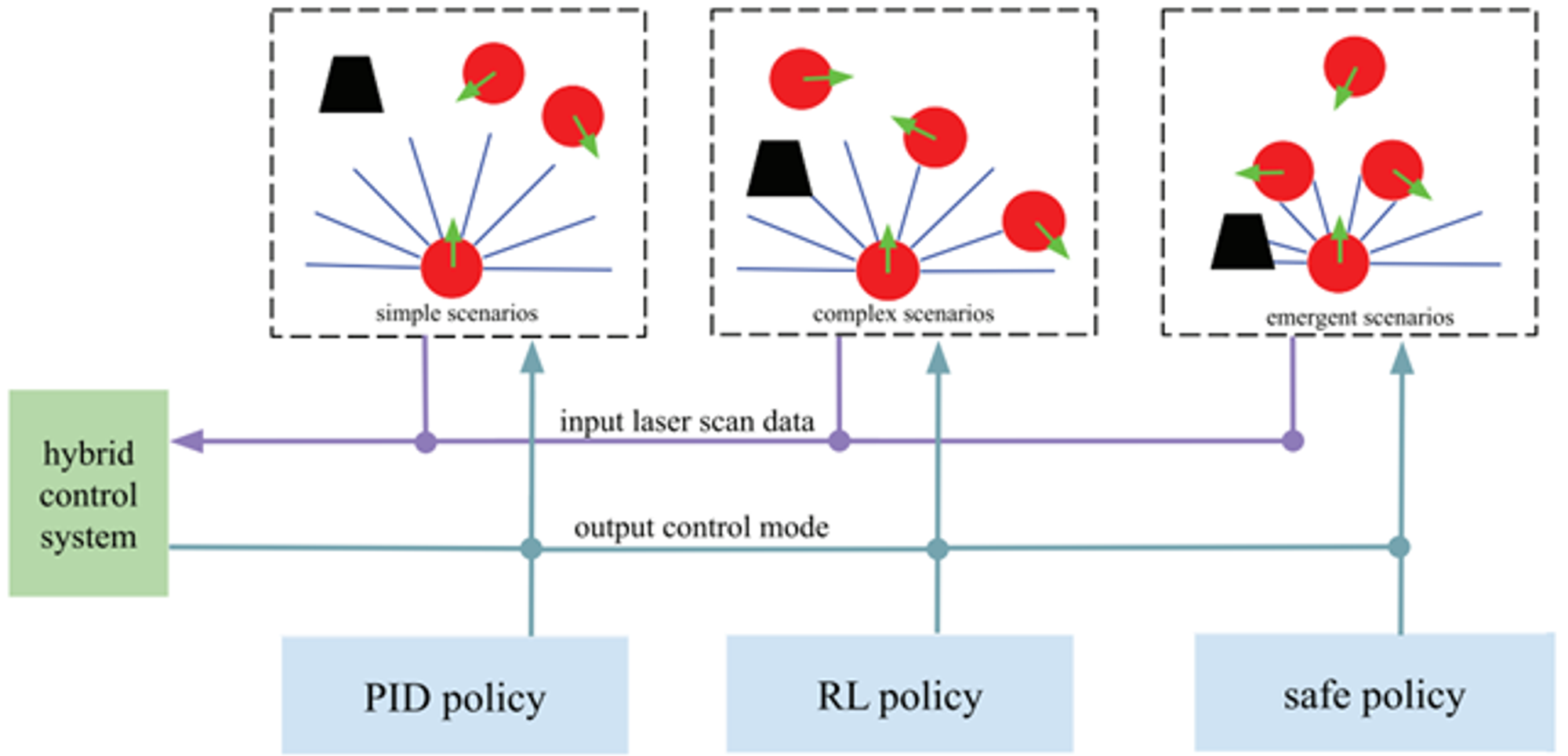
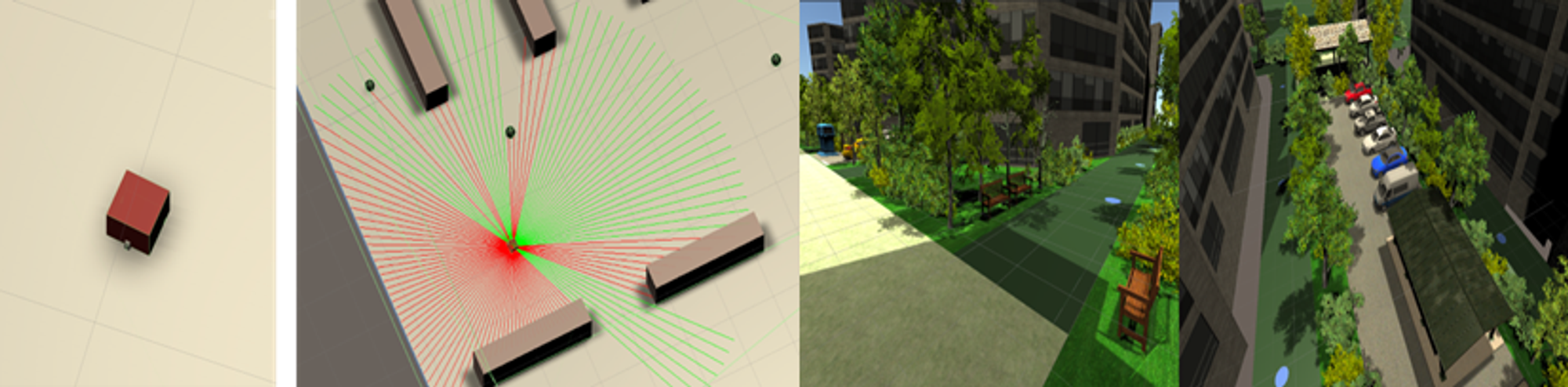
Reinforcement Learning 기반 경로 생성
•
Multi-agents Reinforcement learning
•
Hybrid Policy
•
Unity Software을 이용한 시뮬레이터 구축
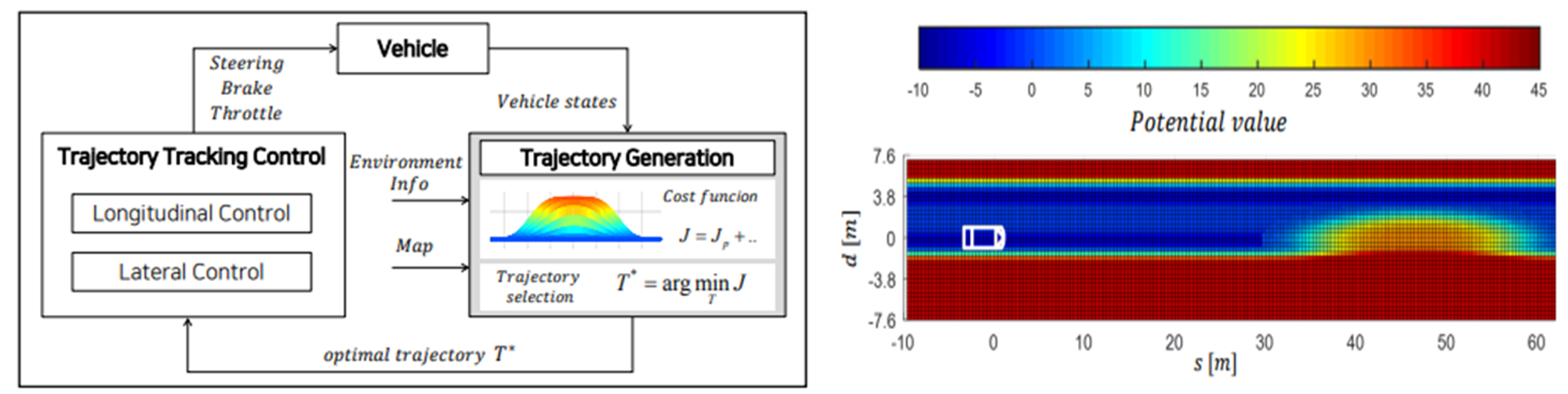
Trajectory Planning using Adaptive Potential Field
•
Risk function best trajectory planning
•
Dynamic object-aware potential field modeling
Path Planning
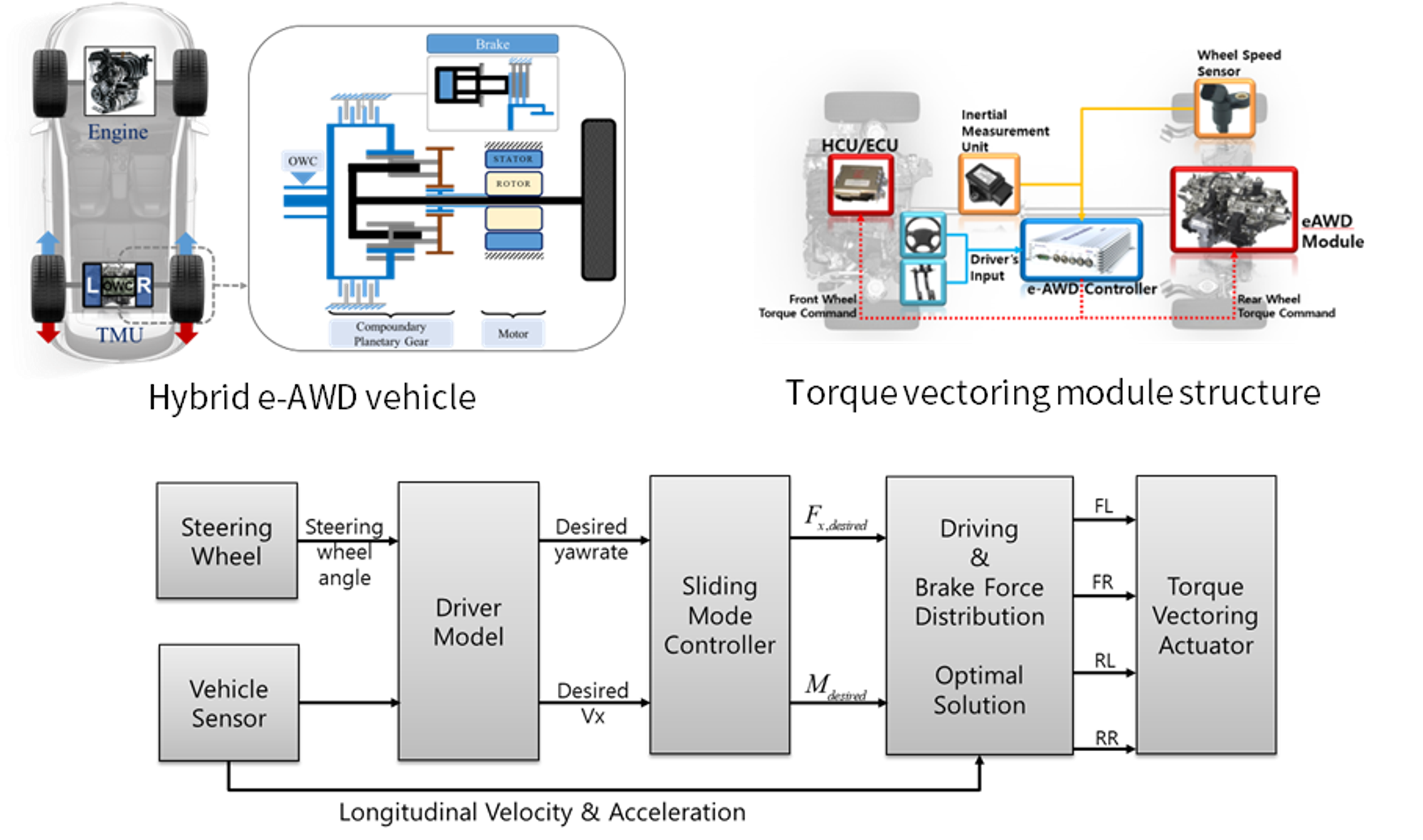
PHEV용 e-AWD 구동시스템 개발
•
주행 연비 개선 및 동력 성능 향상을 위한 제어
•
Torque vectoring / Opimal Torque distribution 제어기 설계
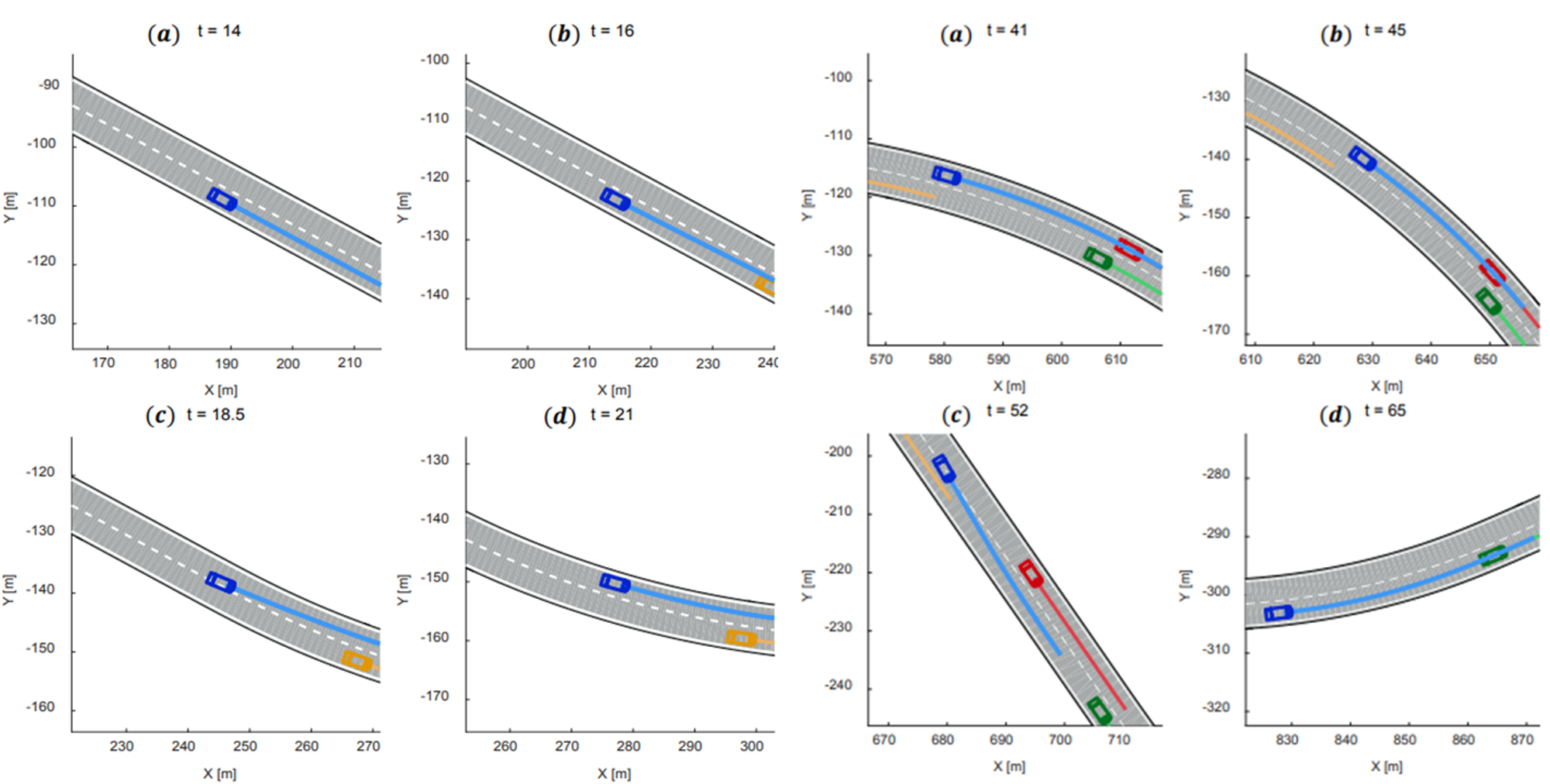
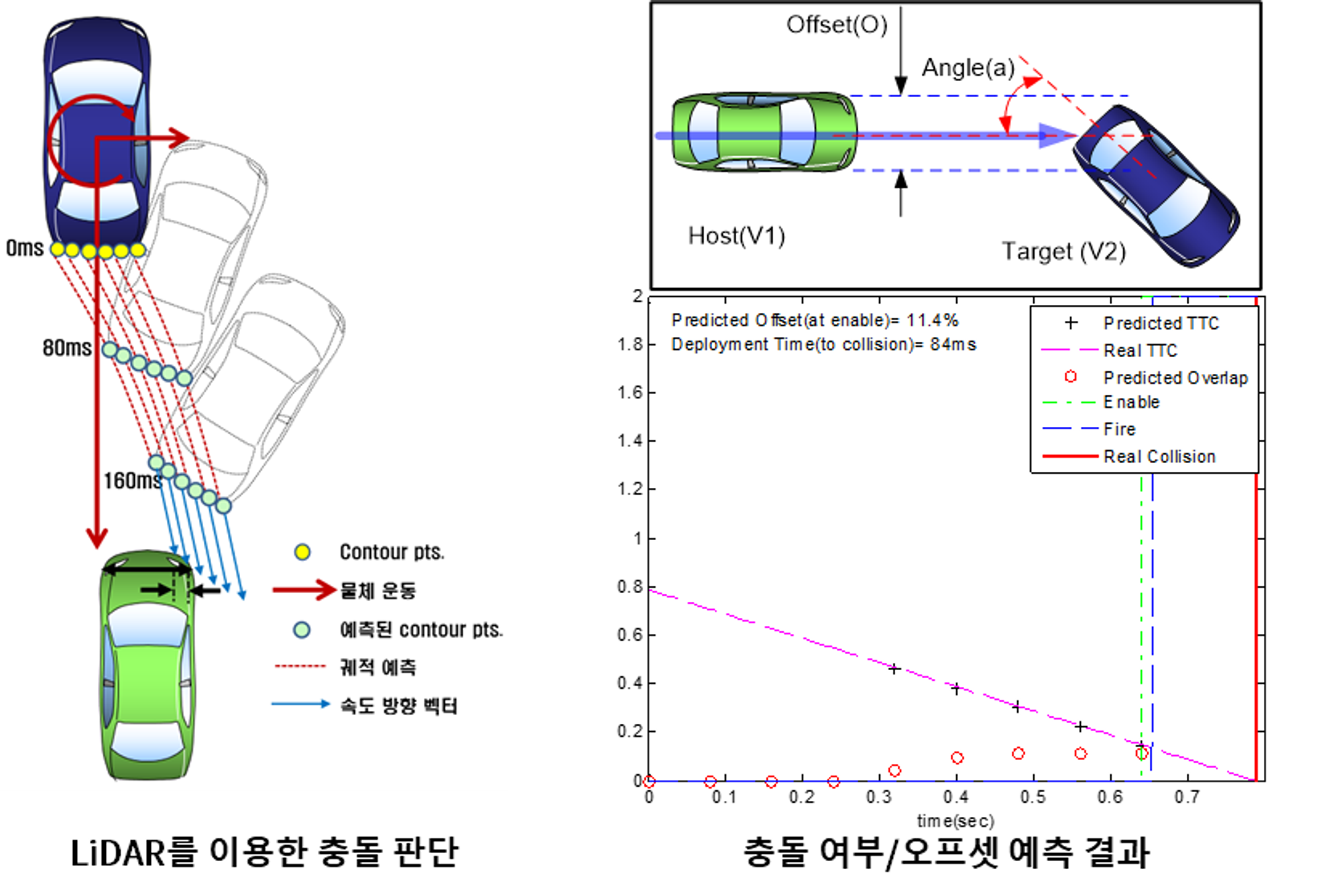
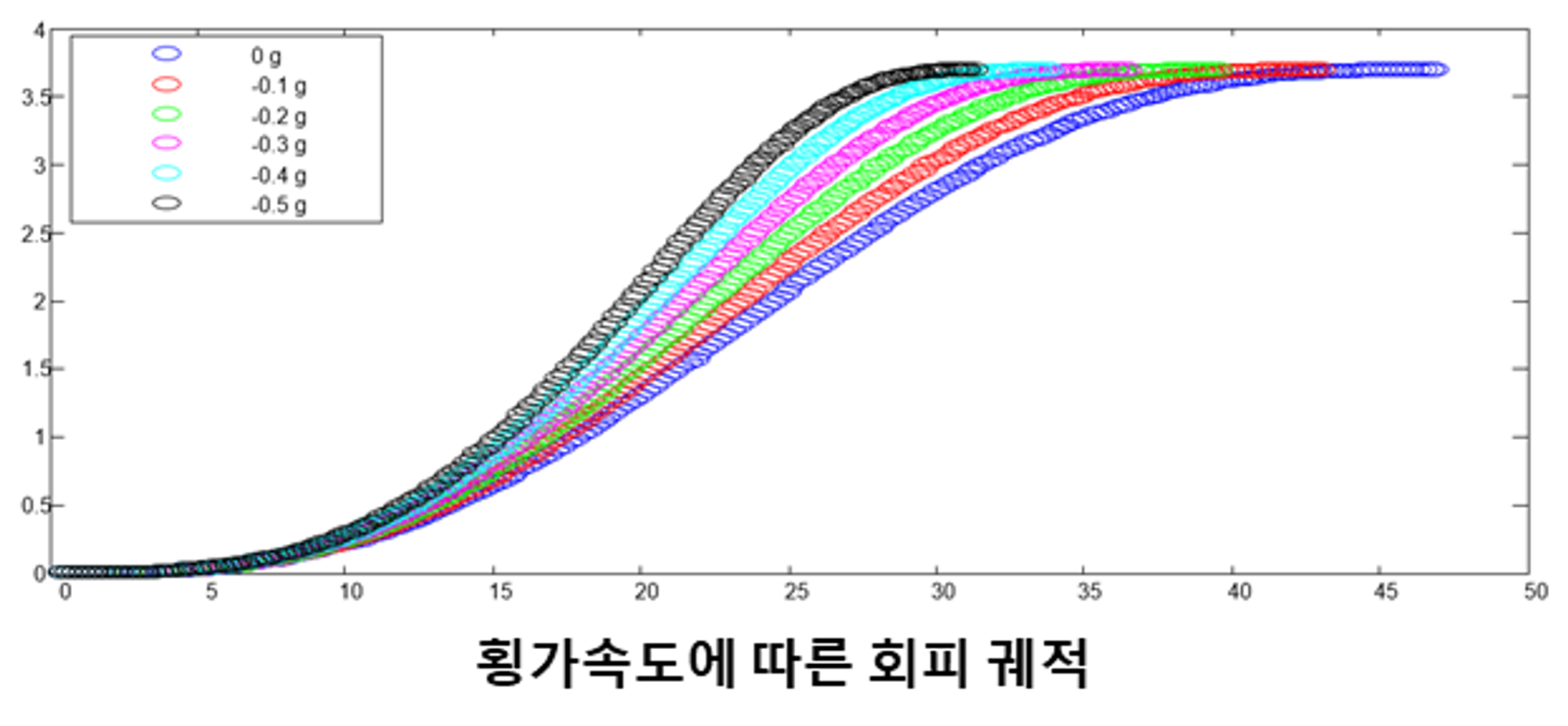
궤적 예측을 통한 충돌 판단 및 회피 제어
•
자차량의 병진/회전을 고려한 미래 궤적 예측 및 장애물과의 충돌 여부 판단
•
제동 회피 가능/불가능 여부 판단 및 불가 시 조향 회피 시도
Control
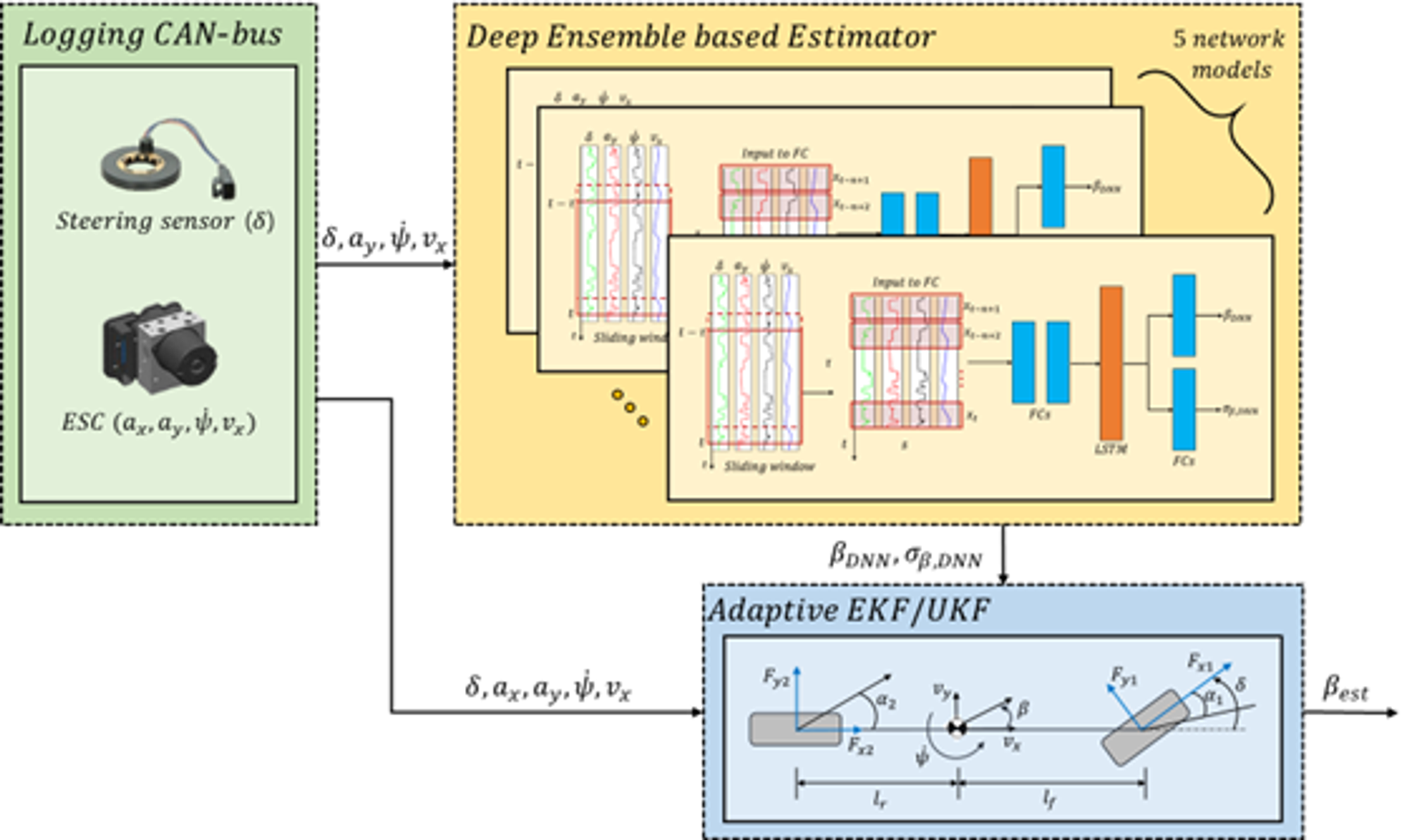
Deep Learning + Kalman filter를 이용한 sideslip ange 추정
Articulation Angle Estimation
•
Tractor와 Trailer 간의 Articulation angle 추정을 위한 모델 구축 및 모델 기반 추정
•
Dynamic, Geometry model 구축
State Estimation
Research Equipment
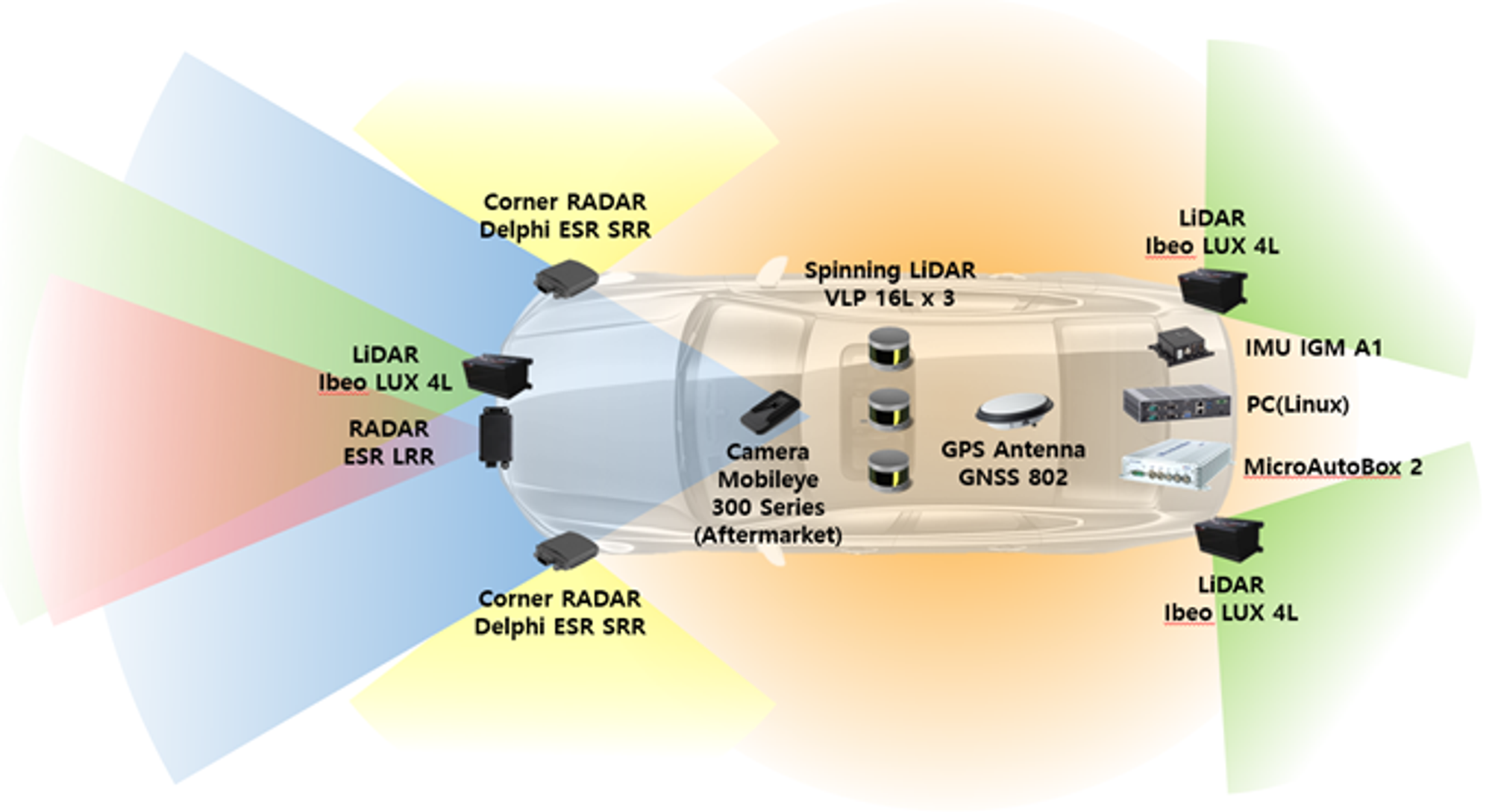
Autonomous Vehicle
•
모델 : Genesis EQ900
•
자율 주행 임시 면허 취득 (~2024)
Sensor Configuration
•
물체 감지
•
측위 : RTK GPS/IMU(보정)
•
연산/제어 : MicroAutoBox 2, Embedded PC
Autonomous Vehicle
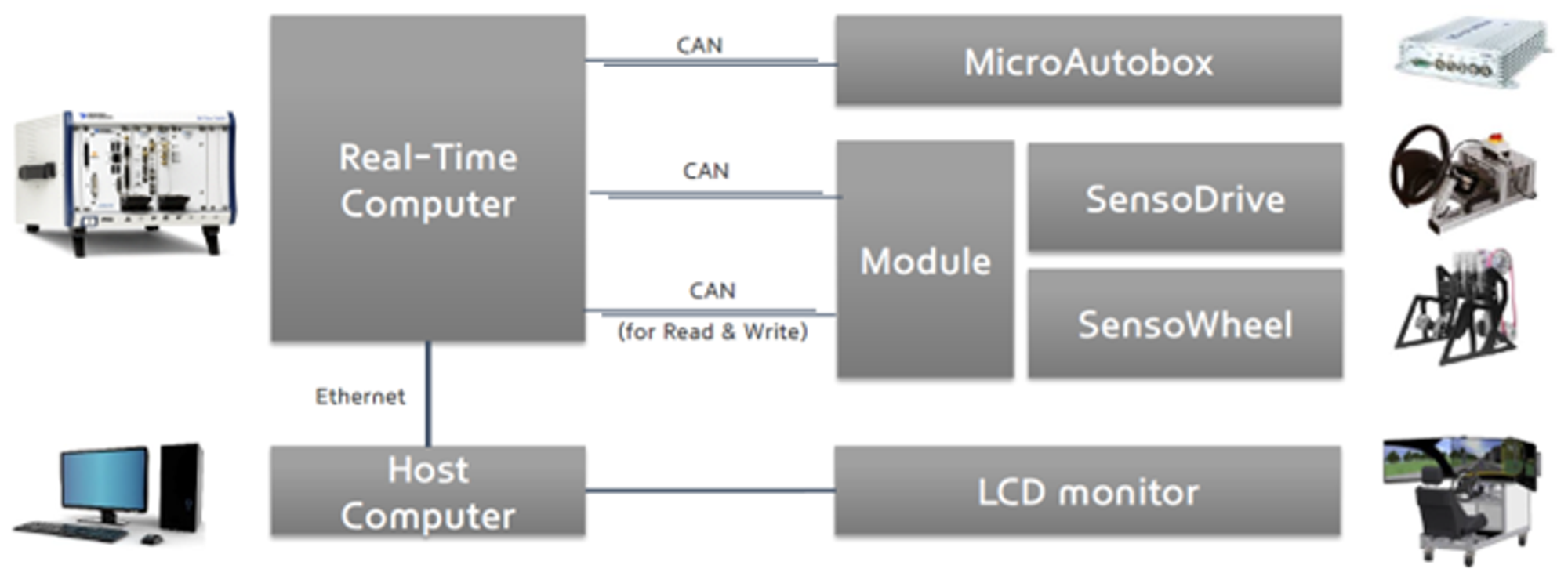
Carmaker Driving Simulator
•
제조사 : IPG Automotive
•
모델 : CarMaker Driving Simulator
•
실제 차량의 조향 및 페달 모듈을 하드웨어로 구현한 통합 검증 장비
•
CAN 통신을 이용한 가상 차량 테스트 환경(CarMaker)에서 실시간 제어
•
MATLAB/Simulink와 연동 가능
•
Configuration
Driving Simulator
Sensor-rich autonomous vehicle - QCAR
•
제조사 : QUANSER
•
자율주행에 사용되는 센서들을 탑재한 알고리즘 검증 장비
•
NVIDIA JETSON TX2 보드를 이용한 딥러닝 환경 구축
•
다양한 도로 형상이 제공되어 여러 시나리오를 검증 가능
•
MATLAB/Simulink, ROS/Linux 환경과 연동 가능
•
하드웨어 구성 : Main board : NVIDIA JETSON TX2 Sensor : LIDAR / RGBD camera / CSI camera(4) / IMU/ Encoder Actuator : Servo Motor(2)
Q-car