Peoples
Research
Publication
Contact
MMC Lab
/
Research
/
Control
/
Professor
Students
International Journal
International Conference
Domestic Journal
Domestic Conference
Patents
MMC Lab
/
Research
/
Control
/
Peoples
Professor
Students
Research
Publication
International Journal
International Conference
Domestic Journal
Domestic Conference
Patents
Contact
🎮
Control
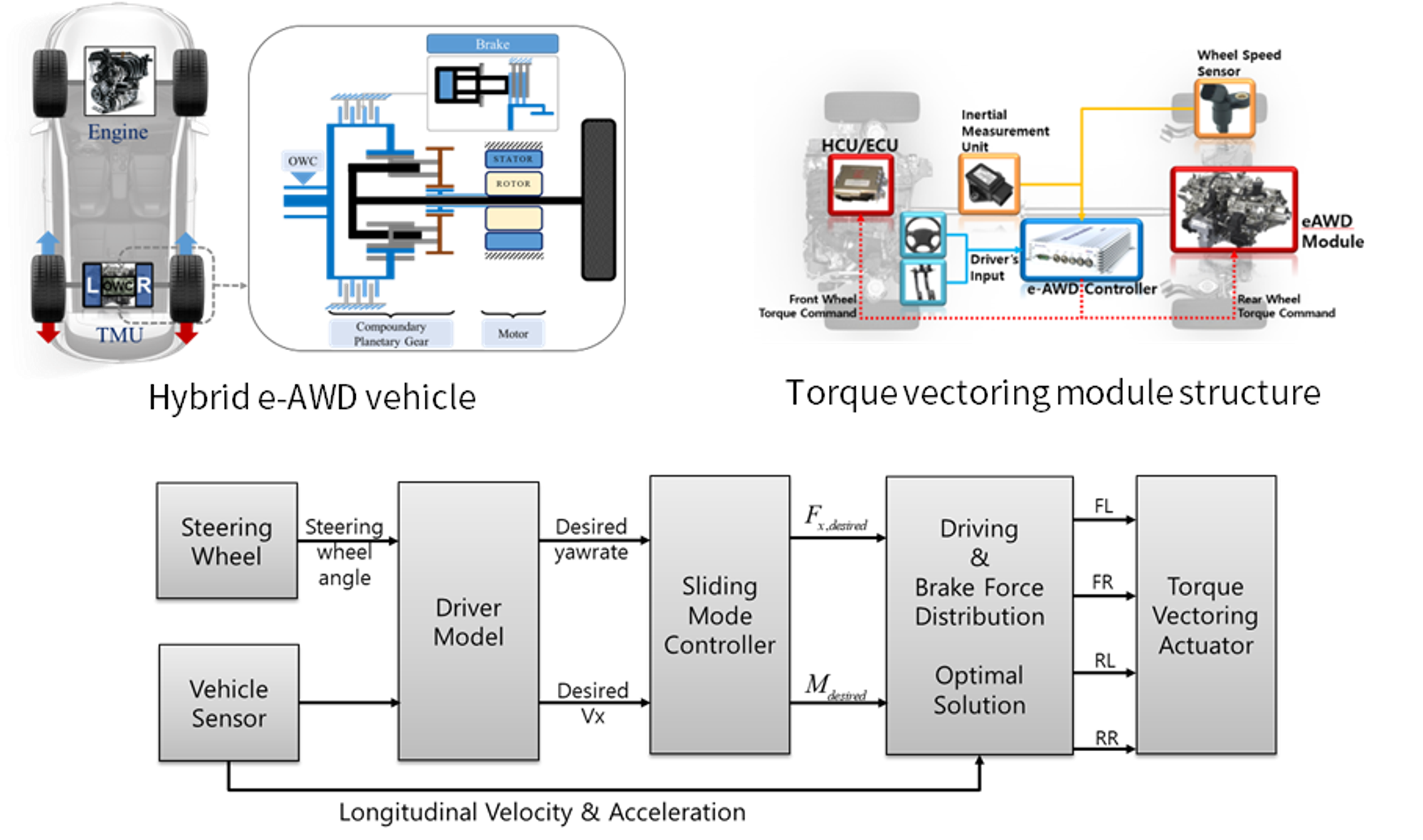
PHEV용 e-AWD 구동시스템 개발
•
주행 연비 개선 및 동력 성능 향상을 위한 제어
•
Torque vectoring / Opimal Torque distribution 제어기 설계
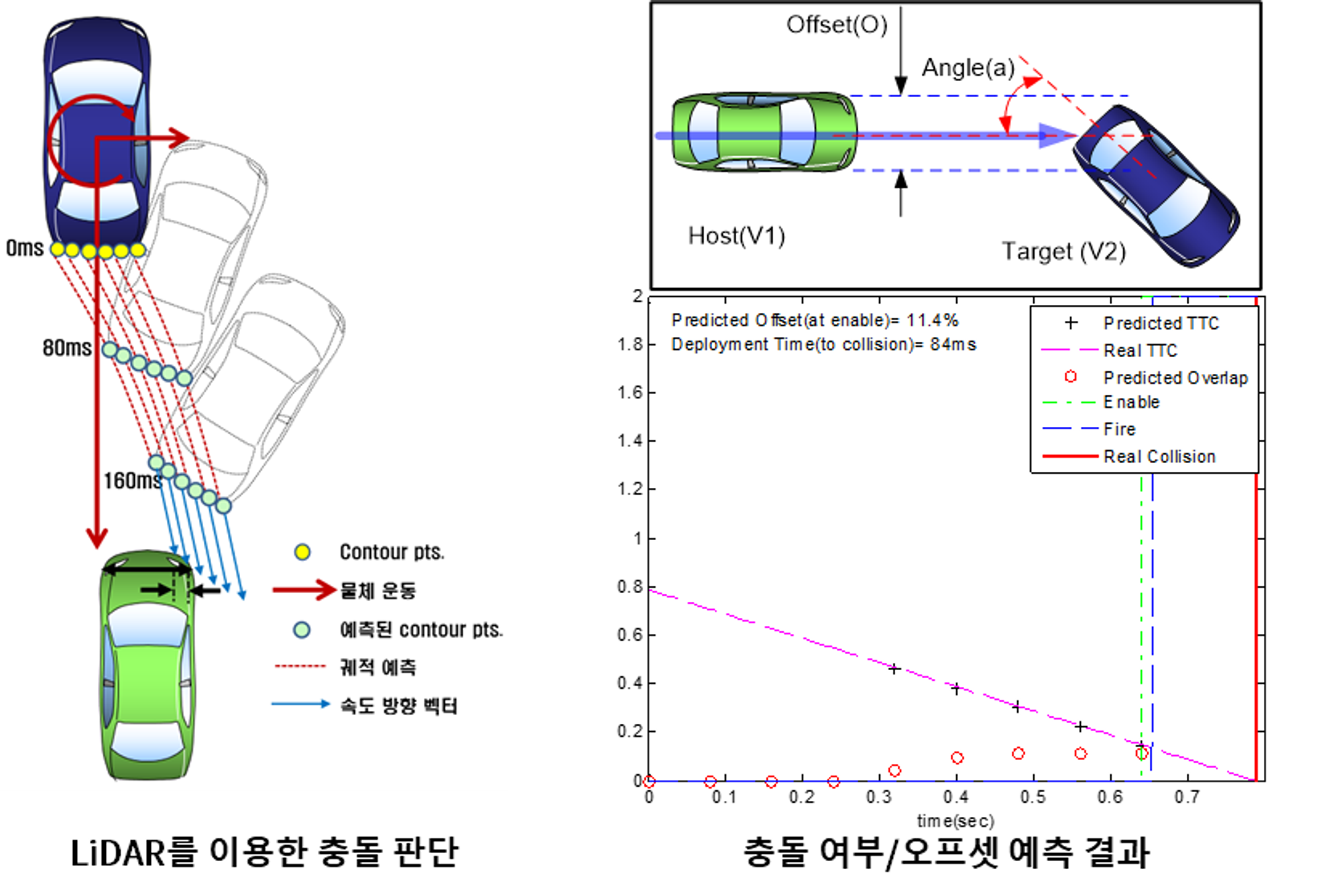
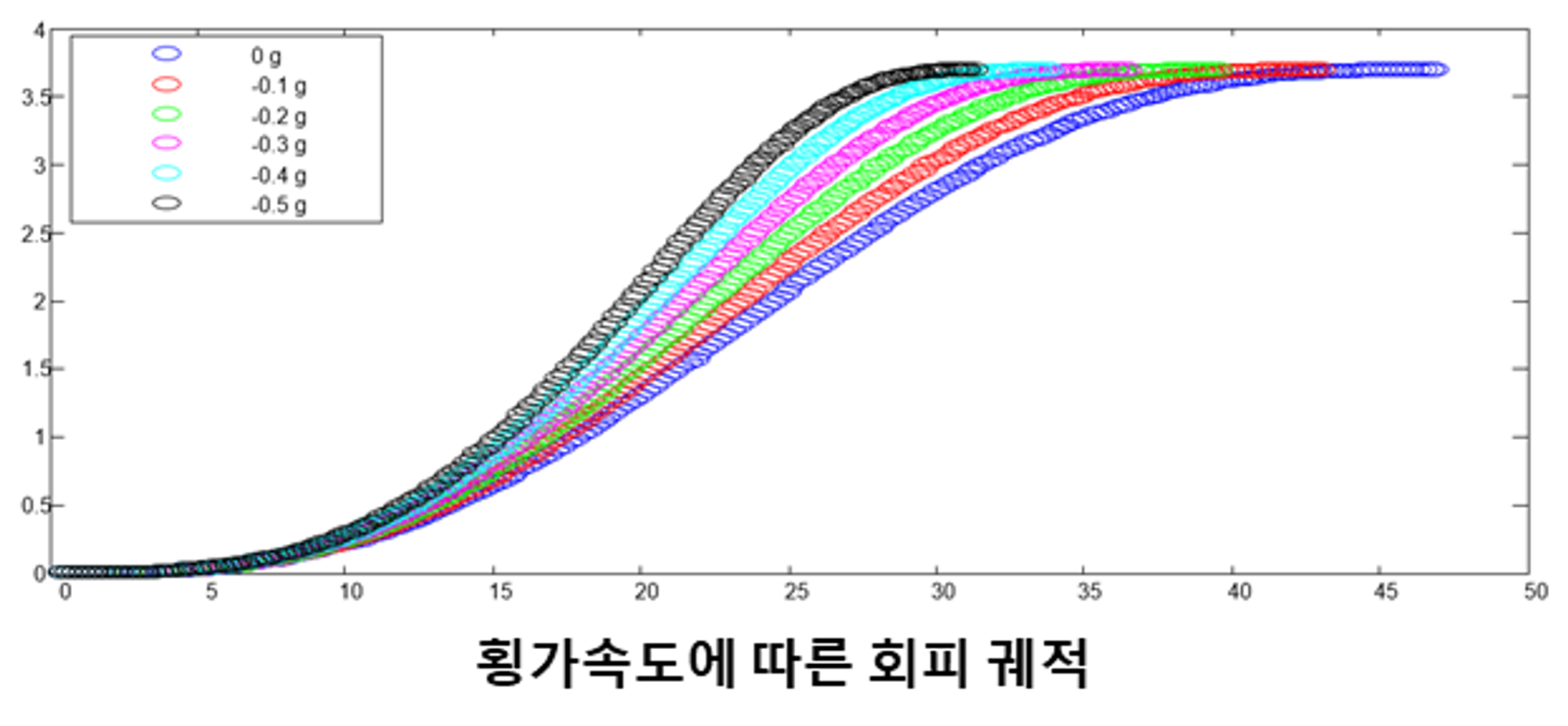
궤적 예측을 통한 충돌 판단 및 회피 제어
•
자차량의 병진/회전을 고려한 미래 궤적 예측 및 장애물과의 충돌 여부 판단
•
제동 회피 가능/불가능 여부 판단 및 불가 시 조향 회피 시도